Lazy Docker Containers
论文粗读:Slacker: Fast Distribution with Lazy Docker Containers
阅读目标
- 了解docker容器启动过程的数据特性,以及slacker的设计思路,不对该存储驱动做过细了解。
介绍
- 开发了名为
HelloBench的工具来分析57个不同的容器应用,分析容器启动过程的IO数据特性和镜像可压缩性,得出结论:在容器的启动过程中,镜像的拉取占76%的时间,但仅读了6.4%的数据。 - 基于这些发现,作者设计开发了一种新的docker存储驱动:Slacker,可以用于加速容器的启动速度。
- Slacker采用中心化存储思路,所有的docker workers和registries都共享这些数据。
- Container的启动主要慢在文件系统的瓶颈,相对而言,network, compute, memory资源更快且简单,容器应用需要一个完整的初始化文件系统,包括应用binary,完整的linux系统和依赖包;
- 在谷歌的研究论文中,容器应用启动延时变化秀大,中间值一般为25s,且package installation占了80%,其中的一个瓶颈为并发写磁盘的过程;
- 提供快启动的好处:
- 应用能快速扩容以应对突发事件(flash-crowd events);
- 集群调度器能以最少的代价频繁执行rebalance nodes;
- 应用更新或bug修复能快速发布;
- 开发者可以交互式构建和测试分发应用;
- 作者分了两步来尝试解决这个问题:
- 开发了开源工具
HelloBench来分析容器启动过程的IO特性和镜像特征,该工具得到如下结论:- 容器启动阶段,copying package data耗时占了76%;
- 这些copy的数据中,仅6.4%的数据是容器启动阶段真实需要的;
- 相比于gzip压缩,简单的跨镜像块去重能达到更好的压缩比;
- 基于这些研究,作者设计开发了Slacker docker存储驱动,该驱动提供了如laziy pull image而不是拉取整个镜像内容,能显著减少网络IO;
- 开发了开源工具
- 基于这些技术,Slacker能提供72倍的镜像pull加速,提供5倍的容器部署周期加速,20倍的应用部署周期加速;
Docker Backgroud
Version Control for Containers
- cgroups通过6个namepsace来提供多种资源的虚拟化隔离:文件系统挂载点、IPC队列、网络、主机名、进程ID和用户ID;
- docker image是多layer的只读文件集合,layer的拉取在网络上是通过gzip tar文件来传输,在本地的存储格式是由对应的docker存储驱动决定;
Docker Storage Driver Interface
当前docker默认采用overlay2存储驱动,部分源码可参考我前面的
OCI镜像规范文档。
- docker容器有两种访问文件系统的方式:1. 通过挂载本机路径到容器中;2. 容器需要访问镜像层的数据,如应用binary, libraries;
- docker是通过存储驱动提供mount point来给容器提供镜像层文件的视图,容器将这些作为其rootfs;
- docker存储驱动需要至少实现如下图的接口:
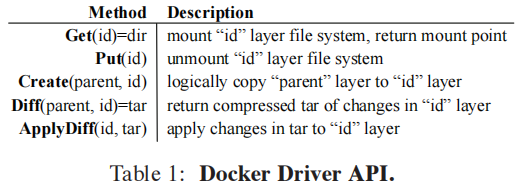
- 其中的Diff和ApplyDiff分别用于生成新的镜像层tar文件和将层的tar文件联合到容器文件系统中,如下图所示:
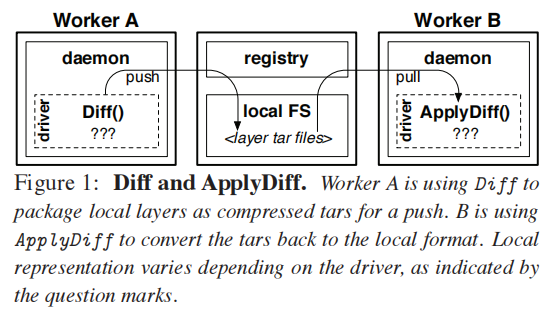
- 联合挂载点提供了底层文件系统的多层目录的聚合视图;
论文中提到的AUFS现在已不是docker的默认存储驱动,现在为overlay2,所以这些内容跳过
Slacker
架构
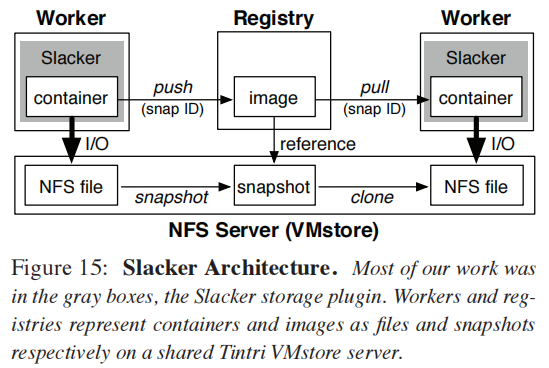
- 其构架的核心思路是将镜像/容器数据统一存储到一个集中式存储器NFS上,这样容器启动时,仅需要读取的数据才会通过网络拉取,避免了同步整个镜像文件的情况,显著减少网络IO:
看到这,需要理解的东西基本差不多了,其它一些技术有点过时或不适用于生产,所以不再继续细读。